Ультразвуковой датчик расстояния HC-SR04
Купить на Паркфлаере
Характеристики:
Напряжение питания: 5В
Ток покоя : <15мА
Эффективный угол обзора: 15°
Диапазон измерения дальности : 2–300 см
Разрешение датчика: 0.3см
Вес: 8.5г | 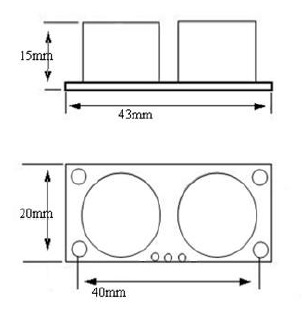 |
Подключение:
| Vcc | напряжение питания 5 вольт
| | Trig | вход запускающих импульсов для процесса измерения
| | Echo | выход импульса длительность которого пропорциональна расстоянию | | GND | общий провод питания |
Принцип действия:
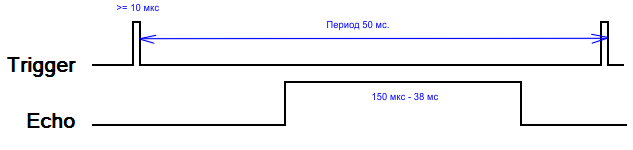
На
вход Trig подается импульс длительностью не менее 10 мкс. После этого
модуль выдает 8 ультразвуковых импульса и ждет эхо. После получения эхо
датчик рассчитывает расстояние и выдает на выходе импульс с шириной
пропорциональной расстоянию. Минимальный интервал между измерениями 50
мкс. Расстояние в сантиметрах рассчитывается как ширина полученного
импульса деленная на 58.
Тестирование:
Ввиду
самого своего принципа действия датчик реагирует не только на
собственное излучение, но и на посторонние шумы. Поэтому чем дальше
датчик находится от предмета (до которого меряет расстояние), тем выше
погрешность измерения. На расстоянии свыше трех метров датчик начинает
непристойно врать. А расстояние свыше четырех метров измерять просто
отказывается. Надо сказать, что если датчик не видит перед собой
препятствие, то импульс на выходе будет бесконечной длинны и фронт 1
-> 0 будет с приходом команды на следующее измерение.
Для тестирования я подключил датчик к ардуине (Trig-9; Echo-3) и подправил скетч из "считаем ширину импульса ШИМ (вариант 2)". В пределах метра результат оказался просто идеальным.
Текст скетча ниже:
void setup()
{
// Все пины порта D кроме нулевого(TX) устанавливаем как входы
DDRD = 1;
// Настраиваем таймер 1 на отсчет 0.5 мкс
TCCR1B = 0;
TCCR1A = 0;
TCNT1 = 0;
TCCR1A = 0;
TCCR1B = 0<<CS12 | 1<<CS11 | 0<<CS10;//0x1A; //start timer with 1/8
// Разрешаем прерывания порта D по изменению уровня
PCICR |= (1 << PCIE2);
// настраиваем маску прерывания - пины 2-7
PCMSK2 = 0xFC;
// открываем UART для вывода результата
Serial.begin(9600);
pinMode(9, OUTPUT);
}
typedef struct {
unsigned long riseTime; // время перехода 0->1
unsigned int lastWidth; // ширина импульса
} tPinTimingData;
volatile static tPinTimingData pinData[6]; //массив каналов
volatile static uint8_t PCintLast;
uint8_t bit;
uint8_t curr;
uint8_t mask;
uint16_t currentTime;
uint16_t time;
// обработчик прерывания порта D
ISR(PCINT2_vect)
{
// текущее время по таймеру 1 в мкс
currentTime = TCNT1>>1;
// Получаем состояние интересующих нас пинов
curr = PIND & 0xFC;
// пины, изменившие состояние
mask = curr ^ PCintLast;
PCintLast = curr;
// в цикле просматриваем каждый пин
for (uint8_t i=0; i < 6; i++) {
// маска текущего пина цыкла
bit = 0x04 << i;
if (bit & mask) {
// если 0->1
if (bit & PCintLast)
// сохраняем текущее время для канала
pinData[i].riseTime = currentTime;
else {
// рассчитываем ширину импульса
time = currentTime - pinData[i].riseTime;
// и сохраняем ее, если результат в разумных пределах
if (time <= 17500)
{
pinData[i].lastWidth = time/29/2;
}
}
}
}
}
void loop()
{
// отправляем датчику импульс в 10 мкс
digitalWrite(9, LOW);
delayMicroseconds(2);
digitalWrite(9, HIGH);
delayMicroseconds(10);
digitalWrite(9, LOW);
// ждем результат
delay(100);
// Вывод результата в UART
Serial.println(pinData[1].lastWidth);
}
| 

